NEW: Drone Learns To Complete Search & Rescue Missions
Environment
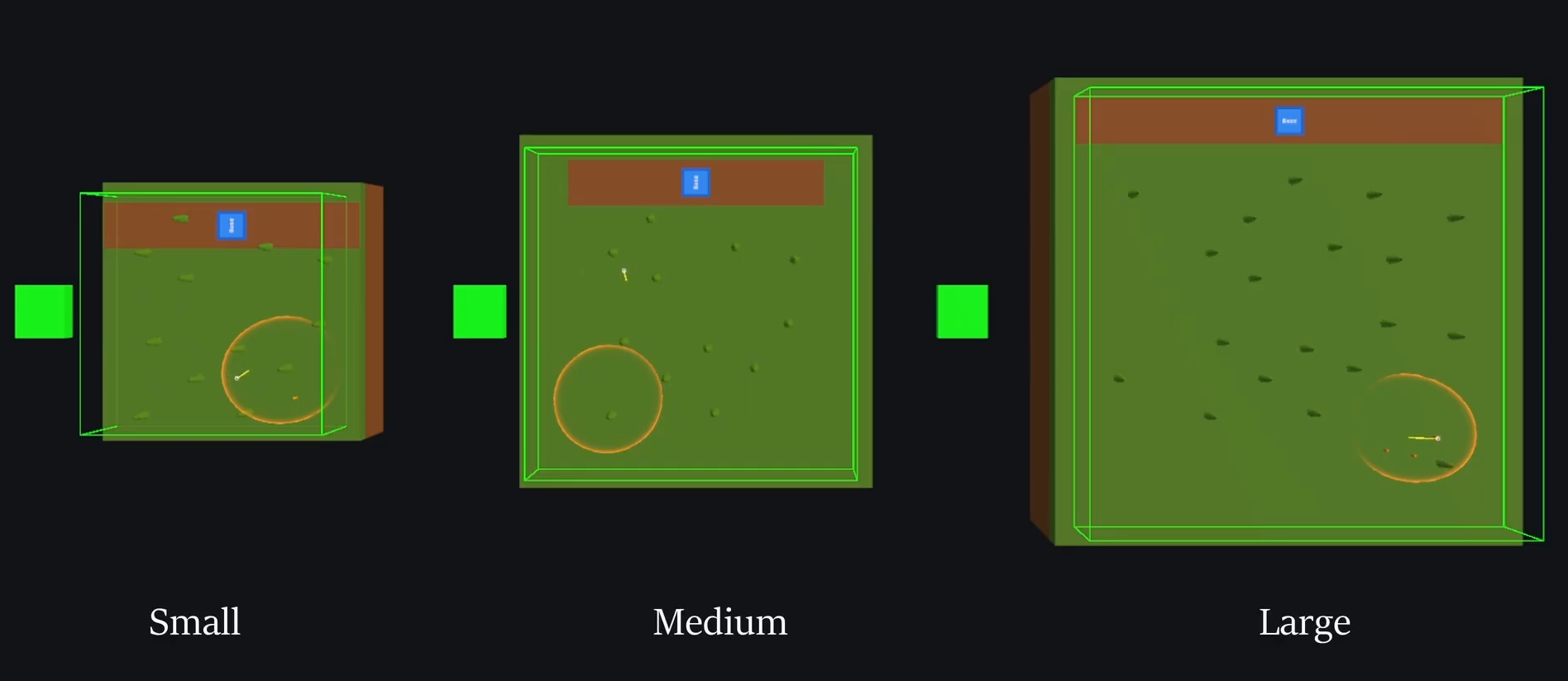
For training the agent, I used curriculum learning, which allows me to increase the difficulty gradually over training steps. For the curriculum, I decided to create three maps of differing sizes. A small, medium and large environment. The reason is that I want the agent to be able to handle travelling to farther places.
In previous training, I only trained on one map, which is the small one. This made the agent generalise the environment and become too uncomfortable, which makes the agent only know how to do the tasks in this one environment. I want it so the agent can scale well to many different environments no matter the size.

Leave a comment
Log in with itch.io to leave a comment.